




En bra målarrobot kombinerar hand, öga och hjärna.
„Bana planering“ motsvarar robotens hjärna, enligt behovet av automatisk planering av spraybanan; ’maskinsyn’ är robotens ögon.
„Maskinsyn“ är robotens ögon, kan ’se’ typ och position för arbetsstycket, justera spraybanan i realtid för att perfekt genomföra sprayingen och därigenom lösa kundens problem orsakade av många olika arbetsstyckeslag och svårigheter att lokalisera dem.

1. BBR-struktur med förskjuten handled, inga singulära punkter framme
2. Explosionsäker certifiering; Kompakt struktur
3. 1600-3800 mm armlängd; 5-15 kg slutbelastning
4. Handledsskyddsnivå når IP67
5. Kan kombineras med 3D-visionssystem för intelligenta målarmaskiner och en AR-följelärningshandtag, vilket gör det bekvämt och lättanvänt
6. Lämplig för sprutningsoperationer i trånga utrymmen
 |
 |
| Intelligenta sprayrobotar för beläggningsområdet | Intelligenta sprayrobotar för beläggningsområdet |
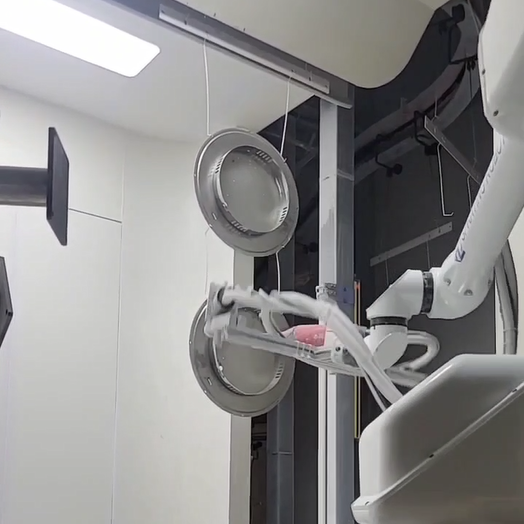
Intelligent sprutmålarrobot med självständiga immateriella rättigheter och stor armlängd fyller luckan för stora sprutmålarmaskiner i Kina. Handleden använder en särskild BBR-typstruktur, och det finns ingen singularitetspunkt vid framåtriktad sprutning, vilket avsevärt förbättrar spruteffektiviteten och kvaliteten.
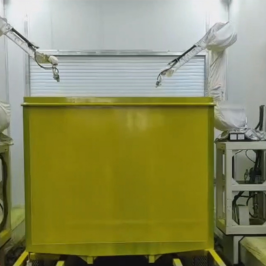
Kombinerad med visuellt deltagarsystem och automatiskt planeringssystem för att bilda ett standardiserat intelligent beläggningsrobotsystem för att uppnå fri undervisning, flexibel sprutning och snabb applikationsimplementering.
Tillhandahåller integrerade intelligenta sprühningslösningar för kundernas behov inom framstående industrier, ersätter manuellt arbete med robotar, sparar på arbetskraftskostnader, sparar på färg, förbättrar sprühningskvaliteten, minskar föroreningar och samtidigt förbättrar konsekvensen i produktens ytqualitet, ökar produktens konkurrenskraft och hjälper företag att uppgradera sina sprühningsprocesser. Till exempel vindkraft, vagnar, fartyg, byggmaskiner och andra industrier.
 |
| Intelligenta sprayrobotar för beläggningsområdet |
Visionkameran hämtar i realtid form- och positionsinformation för det arbetsstycke som ska sprühnas och genererar automatiskt sprühningsspåret på den inhämtade punktmolnen av arbetsstycket, vilket används för att lösa sprühning av plana och enkla böjda ytor samt andra arbetsstycken.
Manuellt håller spraypistolen för att slutföra beläggningen av det nya arbetsstycket, roboten registrerar den manuella beläggningsbanan, och därefter utför roboten beläggning av efterföljande arbetsstycken, vilket används för att lösa problemet med snabb anslutning till det första sprutprogrammet för beläggning av flera kategorier av arbetsstycken.
Planera arbetsstyckets standardposition för sprutbana i förväg och erhåll arbetsstyckets faktiska position genom visionkameran, justera sprutbanan i realtid och skicka den till roboten för att slutföra sprutningen, vilket används för att lösa problemet med svårigheter att lokalisera produktsprutning.
Upphovsrätt © 2025 Yangzhou OURS Machinery Co., Ltd. Alla rättigheter förbehållna. - Integritetspolicy


