


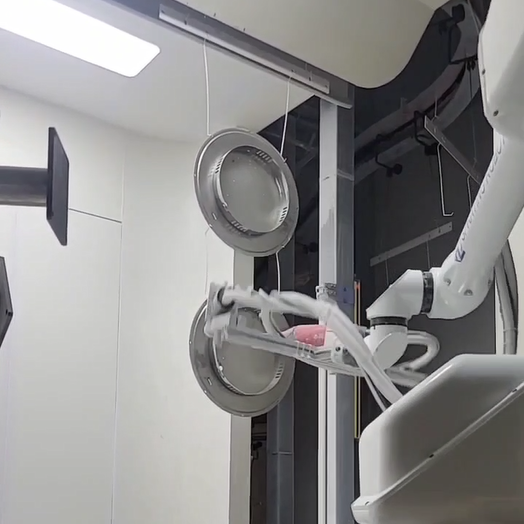


Сайн будагдах робот нь гар, нүд, тархиныг хослуулдаг.
«Траекторын төлөвлөлт» нь будаг түрхэх замыг автоматаар төлөвлөхийн тулд роботын тархи болох бөгөөд «машиний нүд» нь роботын нүд болно.
«Машиний нүд» нь роботын нүд бөгөөд ажлын биеийн төрөл, байршлыг “харж” чаддаг бөгөөд будаг түрхэх замыг бодит цагт тохируулан боловсронгуй байдлаар будаг түрхэх үйлдлийг гүйцэтгэж, ажлын биеийн олон төрөл, байршил тодорхойлоход хэцүү байдаг гэсэн үйлчлүүлэгчийн асуудлыг шийдвэрлэдэг.

1.BBR бүтэц, цохиурын гараа дахь цэгүүдийн цэггүй
2.Дэлбэрэхээс хамгаалах сертификат; Шигшсэн бүтэц
3.1600-3800 мм гарын далавч; 5-15 кг төгсгөлийн ачаалт
4.Гараа хамгаалах түвшин нь lP67 хүрнэ
5.Гарын авлага бүхий 3D харааны системтэй ухаалаг будагдах робот, AR дагалдах сургалтын барилгатай хослуулан ашиглах боломжтой тул ашиглахад тохиромжтой бөгөөд хялбар юм
6.Нарийн зайны будах үйлдвэрлэлийн орчинд тохиромжтой
 |
 |
| Ангилах салбарт зориулсан оюунлаг нисэх роботууд | Ангилах салбарт зориулсан оюунлаг нисэх роботууд |
Их хүрээ бүхий шулуун эрх чөлөөтэй ухаалаг будагдах робот нь Хятад дахь том хэмжээний будагдах роботын хоцрогдлыг нөхөж байгаа бөгөөд, гарын алчуур нь онцгой BBR-ийн бүтэцтэй бөгөөд урд талаас будах үед онцгой цэг байхгүй тул будах үр дүн, чанарыг ихээр сайжруулсан.
Харааны систем, автоматаар төлөвлөх системтэй хослуулан стандарт ухаалаг будагдах роботын системийг бүрдүүлж, чөлөөтэй сургалт явуулах, уян хатан будах, хурдан хэрэглээнд нэвтрүүлэх зорилгыг хангана.
Салбарын жишиг үзүүлэлтэд нийцсэн үйлдвэрлэлийн салбарт зориулан хэрэглэгчийн шаардлагад нийцсэн бүртгэлтэй ухаалгаар түрхэх шийдлийг нийлүүлж, хүний хүчийг роботоор солих, хөдөлмөрийн зардлыг хэмнэх, будаг хэмнэх, түрхэх чанарыг сайжруулах, бохирдлыг бууруулах, мөн бүтээгдэхүүний гадаргуугийн чанарын нэгдмэл байдлыг сайжруулах, бүтээгдэхүүний өрсөлдөх чадварыг нэмэгдүүлэх, түрхэх технологийг шинэчлэхэд тусална. Жишээ нь: цахилгаан эрчим хүч, вагон, онгоц, барилгын машин техник гэх мэт салбарууд.
 |
| Ангилах салбарт зориулсан оюунлаг нисэх роботууд |
Харагч камер нь түрхэх газрын деталийн хэлбэр болон байршлын мэдээллийг бодит цагт авч, деталийн цэгийн олонлог дээр автоматаар түрхэх траекторыг үүсгэдэг бөгөөд энэ нь хавтгай ба энгийн муруй гадаргуу болон бусад деталийг түрхэх асуудлыг шийдвэрлэхэд зориулагдсан.
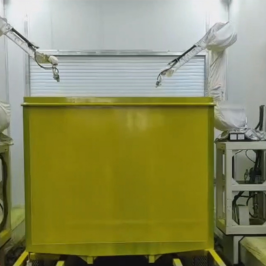
Шинэ ажлын хэсгийн давхаргыг булаахдаа зөөлөн булаагуур гар аргаар барьж гүйцэтгэх бөгөөд робот нь гар аргаар давхарга булаасан траекторийг бичих бөгөөд дараа нь робот нь дараагийн ажлын хэсгүүдийн давхаргыг булааж гүйцэтгэх бөгөөд энэ нь олон төрлийн ажлын хэсэгт анхны булаах програмд хурдан нэвтрэх асуудлыг шийдвэрлэхэд зориулагдсан.
Ажлын хэсгийн стандарт байрлалын булаах траекторийг урьдчилан төлөвлөж, харааны камерийн тусламжтайгаар ажлын хэсгийн бодит байрлалыг тогтоож, булаах траекторыг бодит цагт тохируулан роботод илгээж булаах үйл явцыг гүйцэтгэх бөгөөд энэ нь бүтээгдэхүүний булаах байрлалыг тодорхойлоход бэрхшээлтэй байх асуудлыг шийдвэрлэхэд зориулагдсан.
Зохиогчийн эрх © 2025 Янчжоу OURS Machinery Co., Ltd. Бүх эрх хуулиар хамгаалагдсан. - Нууцлалын бодлого


