




İyi bir boya robotu, el, göz ve beyni birleştirir.
‘Yörünge planlaması’, boyama yörüngesinin talebe göre otomatik olarak planlanması anlamına gelir ve robotun beynine eşdeğerdir; ‘makine görüşü’ ise robotun gözleridir.
‘Makine görüşü’, robotun gözleridir ve iş parçasının türünü ve konumunu ‘görebilir’. Boyama yörüngesini gerçek zamanlı olarak ayarlayarak boyamayı kusursuz şekilde gerçekleştirir ve böylece müşterinin birçok farklı iş parçası türü olması ve konumlandırma zorluğu yaşaması gibi sorunlarını çözer.

1. BBR yapı offset bilek, ön kısımda tekil nokta yok
2. Patlamaya karşı koruma sertifikası; Kompakt yapı
3. 1600-3800 mm kol açıklığı; 5-15 KG uç yükü
4. Bilek koruma seviyesi IP67'ye ulaşır
5. 3D görsel sistemle akıllı boyama robotları ve AR destekli öğretim koluyla birlikte kullanılabilir, kullanımı kolay ve pratik hale getirir
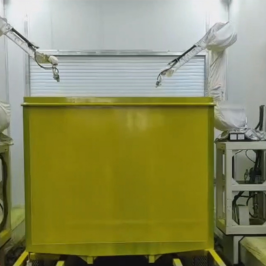
6. Dar alan püskürtme operasyon ortamı için uygundur
 |
 |
| Kaplama alanında kullanılan akıllı püskürtme robotları | Kaplama alanında kullanılan akıllı püskürtme robotları |
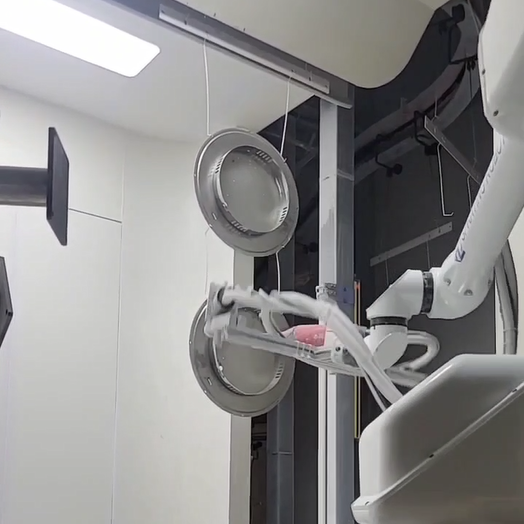
Büyük kol açıklığına sahip, bağımsız fikri mülkiyet haklarına sahip akıllı püskürtme robotu, Çin'de büyük püskürtme robotu alanında boşluğu doldurur. Bilek özel BBR tipi yapıyı benimser ve ön yüzey püskürtmesinde tekillik noktası bulunmaz, bu da püskürtme verimliliğini ve kalitesini büyük ölçüde artırır.
Görsel parti sistemi ve otomatik planlama sistemi ile birleştirilerek serbest öğretim, esnek püskürtme, hızlı uygulama indirme amacıyla standart akıllı kaplama robot sistemi oluşturulur.
Rüzgar enerjisi, karoserler, gemiler, inşaat makineleri ve diğer endüstriler gibi kıyaslama sektörlerindeki müşterilerin ihtiyaçları için entegre akıllı püskürtme çözümleri sunar; işgücünü robotlarla değiştirerek işçilik maliyetlerini tasarruf etmek, boya tasarrufu sağlamak, püskürtme kalitesini artırmak, kirliliği azaltmak, aynı zamanda ürün yüzey kalitesinin tutarlılığını artırmak, ürün rekabet gücünü artırmak ve işletmelerin püskürtme süreçlerini yükseltmelerine yardımcı olmak.
 |
| Kaplama alanında kullanılan akıllı püskürtme robotları |
Görüntü kamerası, püskürtülecek iş parçasının şeklini ve konum bilgisini gerçek zamanlı olarak alır ve iş parçasının elde edilen nokta bulutu üzerinde otomatik olarak püskürtme trajektorisini oluşturur; bu işlem düz ve basit eğrisel yüzeyler ile diğer iş parçalarının püskürtülmesini çözmek için kullanılır.
Yeni iş parçası kaplamasını tamamlamak için püskürtme tabancasını elle tutarak, robot el ile yapılan kaplama yolunu kaydeder ve ardından gelen iş parçalarının kaplamasını robot tamamlar. Bu durum, çok çeşitli iş parçaları kaplaması için ilk püskürtme programına hızlı erişim sorununu çözmek amacıyla kullanılır.
İş parçasının standart konumuna ait püskürtme yolunu önceden planlayın ve iş parçasının gerçek konumunu görüş kamerası aracılığıyla edinin, püskürtme yolunu gerçek zamanlı olarak ayarlayın ve robotun püskürtmeyi tamamlaması için gönderin. Bu işlem, ürün püskürtmesinin konumlandırılmasının zor olduğu sorunu çözmek amacıyla kullanılır.
Telif Hakkı © 2025 Yangzhou OURS Machinery Co., Ltd. Tüm hakları saklıdır. - Gizlilik politikası


