




Добар робот за сликање комбинује руку, око и мозак.
планрање путања је еквивалентно мозгу робота, према захтеву за аутоматским планирањем путања прскања; машинско видјење су очи робота.
машинско видјење је очи робота, може видети тип и локацију радног комада, у реалном времену прилагођавање пута распршивања да савршено изврши распршивање, да реши проблем купца због многих врста радног комада, тешко је пронаћи проблем.

1.ББР структура издвојите зглобови, нема појединачних тачака на предњој страни
2.Сертификација против експлозије; Компактна структура
3.1600-3800 мм опсег руку; 5-15КГ крајње оптерећење
4.Ниво заштите зглоба достиже IP67
5.Може се спаривати са 3Д системом визије за интелигентне роботе за сликање и АР руководилом за наставу, што га чини погодним и једноставним за употребу
6.Подредан за уску простору опкружености оптерећења прскањем
 |
 |
| Разумни роботи за прскање за поље премаза | Разумни роботи за прскање за поље премаза |
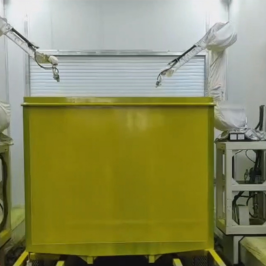
Разумни робот за прскање са независним правама интелектуалне својине са великим распоном руке попуњава празнину великог робота за прскање у Кини. Зглоб усваја посебну структуру типа ББР-а, а нема јединствене тачке у предњој прскању, што значајно побољшава ефикасност и квалитет прскања.
Комбиновано са визуелним партијским системом и аутоматским системом планирања да формира стандардни интелигентни систем робота за премазивање како би се постигла сврха бесплатне наставе, флексибилног прскања, брзе примјештање.
Обезбедити интегрисана интелигентна решења за прскање за потребе купаца у референтним индустријама, замењујући ручни рад роботима, штедећи трошкове рада, штедећи боју, побољшавајући квалитет прскања, смањујући загађење, а истовремено, побољшавајући конзистенцију квалитета површине производа, повећавајући конкурентност Као што су енергија ветра, кочије, бродови, грађевинске машине и друге индустрије.
 |
| Разумни роботи за прскање за поље премаза |
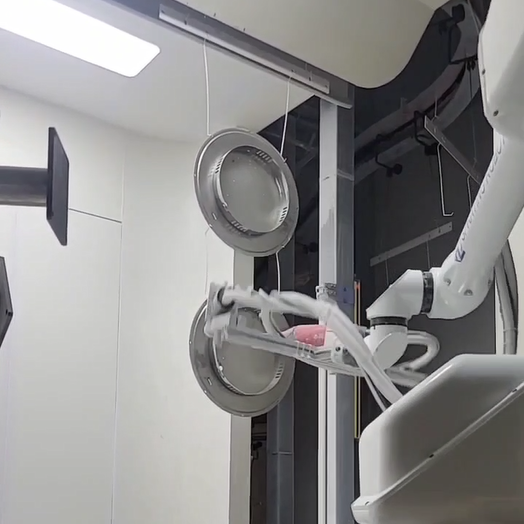
Визијска камера добија информације о облику и положају обраде која се спреја у реалном времену и аутоматски производи траекторију спрејања на добијеном облаку тачака обрада, који се користи за решавање прскања равних и једноставних закривљених површина и других обрада.
Ручно држећи пиштољ за прскање како би завршио покривање новог радног комада, робот бележи трајекторију ручног покривања, а затим робот завршава покривање наредних радних комада, што се користи за решавање проблема брзог приступа првом сету програма за прскање за покривање радног
Планирајте стандардну позицију радног комада у претходној трајекторији прскања и добијте стварну позицију радног комада кроз визуелну камеру, подесите трајекторију прскања у реалном времену и пошаљите га роботи да заврши прскање, што се користи за решавање проблема тешко лоцирати
Ауторска права © 2025 Јангџоу ОУРС Машинерс Цо, Лтд.Сва права задржана. - Политике приватности


