




يجمع روبوت الرسم الجيد بين اليد والعين والدماغ.
تُعتبر 'تخطيط المسار' ما يعادل دماغ الروبوت، حيث تقوم بالتخطيط التلقائي لمسار الرش وفقاً للطلب؛ وتعتبر 'الرؤية الآلية' عيون الروبوت.
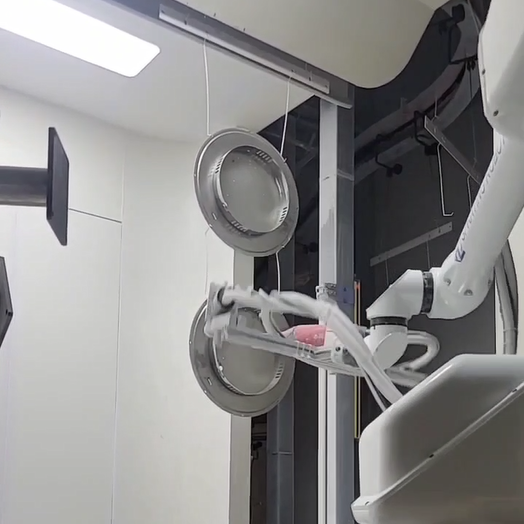
الرؤية الآلية هي عيون الروبوت، ويمكنها 'رؤية' نوع ومكان القطعة المراد معالجتها، وتقوم بتعديل مسار الرش في الوقت الفعلي لتنفيذ عملية الرش بشكل مثالي، مما يحل مشكلة العميل الناتجة عن تنوع أنواع القطع الصعبة التموضع.

1. هيكل BBR مع معصم مزاح، بدون نقاط فردية في الجهة الأمامية
2. شهادة مقاومة الانفجار؛ هيكل مدمج
3. مدى الذراع من 1600 إلى 3800 مم؛ حمل نهاية من 5 إلى 15 كجم
4. مستوى حماية المعصم يصل إلى IP67
5. يمكن إقرانه بنظام رؤية ثلاثي الأبعاد للروبوتات الذكية الخاصة بالطلاء ومقبض تعليمي تابع للواقع المعزز (AR)، مما يجعله مريحًا وسهل الاستخدام
6. مناسب لبيئة تشغيل الرش في المساحات الضيقة
 |
 |
| روبوتات ذكية للرش في مجال الطلاء | روبوتات ذكية للرش في مجال الطلاء |
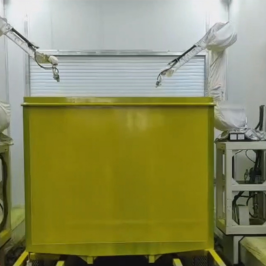
روبوت ذكي للرش يتمتع بحقوق ملكية فكرية مستقلة مع مدى ذراع كبير، ويُعبئ الفراغ الموجود في مجال الروبوتات الكبيرة للرش في الصين. يعتمد المعصم على هيكل خاص من النوع BBR، ولا توجد نقطة شاذة عند الرش الأمامي، مما يحسن بشكل كبير من كفاءة وجودة الطلاء.
مدمج مع نظام الرؤية والجزء البصري ونظام التخطيط التلقائي لتشكيل نظام روبوت طلاء ذكي قياسي لتحقيق الهدف المتمثل في التعليم الحر، والرش المرِن، والتطبيق السريع.
توفير حلول رش ذكية متكاملة لتلبية احتياجات العملاء في الصناعات الرائدة، واستبدال العمالة بالروبوتات، وتوفير تكاليف العمالة، وتوفير الدهان، وتحسين جودة الرش، والحد من التلوث، وفي الوقت نفسه تحسين اتساق جودة السطح للمنتج، وزيادة قدرة المنتج التنافسية، ومساعدة الشركات على ترقية عمليات الرش الخاصة بها، مثل صناعة الطاقة الريحية، والعربات، والسفن، والآلات الإنشائية وغيرها من الصناعات.
 |
| روبوتات ذكية للرش في مجال الطلاء |
تقوم كاميرا الرؤية باستخلاص معلومات شكل ومكان القطعة المراد رشها في الوقت الفعلي، وتُنتج تلقائيًا مسار الرش على سحابة النقاط المستخلصة من القطعة، وذلك لحل مشكلة رش الأسطح المسطحة والأسطح المنحنية البسيطة وغيرها من القطع.
إمساك مسدس الرش يدويًا لإكمال طلاء القطعة الجديدة، ويقوم الروبوت بتسجيل مسار الطلاء اليدوي، ثم يقوم الروبوت بإكمال طلاء القطع اللاحقة، ويُستخدم ذلك لحل مشكلة الوصول السريع إلى أول برنامج رش للقطع متعددة الفئات.
تخطيط مسار رش افتراضي للوضع القياسي للقطعة مسبقًا، والحصول على الموضع الفعلي للقطعة من خلال كاميرا الرؤية، ثم تعديل مسار الرش في الوقت الفعلي وإرساله إلى الروبوت لإكمال عملية الرش، ويُستخدم ذلك لحل مشكلة صعوبة تحديد موقع المنتج المراد رشه.
حقوق الطبع والنشر © 2025 شركة يانغتشو OURS للآلات المحدودة. جميع الحقوق محفوظة. - سياسة الخصوصية


