


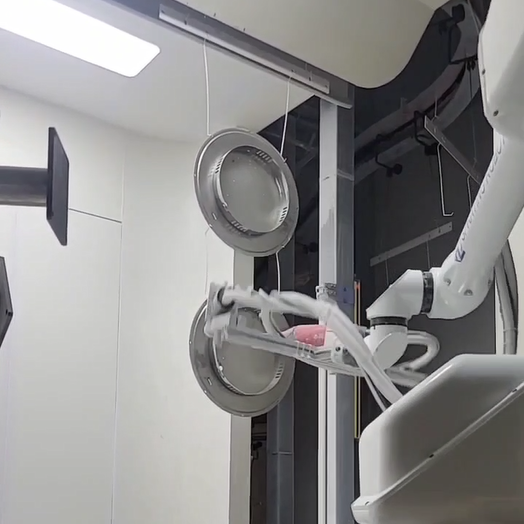


یک ربات رنگپاش خوب ترکیبی از دست، چشم و مغز است.
«برنامهریزی مسیر» معادل مغز ربات است که بر اساس نیاز، مسیر افشانه را بهصورت خودکار برنامهریزی میکند؛ «بینایی ماشین» نیز چشمهای ربات محسوب میشود.
«بینایی ماشین» چشم ربات است که میتواند نوع و محل قطعه کار را «ببیند»، مسیر پاشش را بهصورت زنده تنظیم کند و عملیات پاشش را بهطور کامل انجام دهد تا مشکل مشتری ناشی از تنوع انواع قطعات کار و دشواری در تعیین موقعیت آنها را حل کند.

1. ساختار BBR دارای مچ معکوس است و در قسمت جلویی هیچ نقطه تکینهای وجود ندارد
2. گواهی ضد انفجار؛ ساختار فشرده
3. دهانه بازوی 1600-3800 میلیمتر؛ بار انتهایی 5-15 کیلوگرم
4. سطح حفاظت مچ به IP67 میرسد
5. میتواند با سیستم دید سهبعدی برای رباتهای نظارت هوشمند و هندل آموزش پیگیری مکمل AR همراه شود که استفاده از آن را آسان و راحت میکند
6. مناسب برای محیط عملیاتی پاشش در فضاهای باریک
 |
 |
| رباتهای هوشمند افشانهای برای حوزه پوششدهی | رباتهای هوشمند افشانهای برای حوزه پوششدهی |
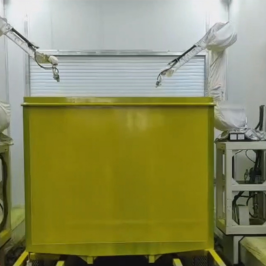
ربات پاشش هوشمند با حقوق مالکیت معنوی مستقل و دهانه بازوی بزرگ، خلاء ربات پاشش بزرگ در چین را پر میکند. مچ دست از ساختار ویژه نوع BBR بهره میبرد و در پاشش جلویی نقطه تکینگی وجود ندارد که کارایی و کیفیت پاشش را بهطور قابل توجهی افزایش میدهد.
ترکیب شده با سیستم طرف بصری و سیستم برنامهریزی خودکار تا یک سیستم استاندارد ربات پوششدهی هوشمند را تشکیل دهد و به هدف آموزش آزاد، پاشش انعطافپذیر و کاربرد سریع دست یابد.
ارائه راهکارهای یکپارچه و هوشمند پاشش بهمنظور پاسخگویی به نیازهای مشتریان در صنایع مرجع، جایگزینی رباتها به جای نیروی انسانی، صرفهجویی در هزینههای کارگری، کاهش مصرف رنگ، بهبود کیفیت پاشش، کاهش آلودگی و همچنین ارتقای یکنواختی کیفیت سطح محصولات، افزایش رقابتپذیری محصولات و کمک به شرکتها در ارتقای فرآیندهای پاشش خود. از جمله صنایع بادی، واگنسازی، کشتیسازی، ماشینآلات ساختمانی و سایر صنایع مشابه.
 |
| رباتهای هوشمند افشانهای برای حوزه پوششدهی |
دوربین بینایی، اطلاعات شکل و موقعیت قطعه کار مورد نیاز برای پاشش را بهصورت زمان واقعی دریافت میکند و بهصورت خودکار مسیر پاشش را بر روی ابر نقاط قطعه کار تولید میکند که برای حل مسائل پاشش سطوح تخت و سطوح منحنی ساده و سایر قطعات کار به کار میرود.
نگه داشتن دستی اسلحه پاشش برای تکمیل پوشش قطعه کار جدید، ربات مسیر پاشش دستی را ضبط میکند و سپس ربات پوششدهی قطعات کار بعدی را انجام میدهد، که برای حل مشکل دسترسی سریع به اولین مجموعه برنامههای پاشش برای پوشش قطعات کار چندگانه استفاده میشود.
برنامهریزی مسیر استاندارد پاشش در موقعیت قطعه کار از قبل، و بدست آوردن موقعیت واقعی قطعه کار از طریق دوربین بینایی، تنظیم مسیر پاشش به صورت زمان واقعی و ارسال آن به ربات برای تکمیل پاشش، که برای حل مشکل دشواری در تعیین موقعیت پاشش محصول استفاده میشود.
کپیرایت © 2025 شرکت ماشینآلات یانگژو OURS، کلیه حقوق محفوظ است. - سیاست حفظ حریم خصوصی


