
דף הבית > מוצרים > רובוט ציור




רובוט צביעה טוב משלב יד, עין ומוח.
„תכנון מסלול“ שקול למוח של הרובוט, בהתאם לצורך בתכנון אוטומטי של מסלול הצביעה; „ראייה מכנית“ היא העיניים של הרובוט.
„ראייה מכנית“ היא עיניים של הרובוט, יכולה ‘לראות’ את סוג והמיקום של החלק, להתאים בזמן אמת את מסלול הצביעה כדי לבצע את הצביעה באופן מושלם, ולפתור את הבעיה של הלקוח הנגרמת מגיוון רב של סוגי חלקים וקושי במיקום.

1. מבנה BBR של כדור היד עם תזוזה, ללא נקודות סינגולריות בצד הקדמי
2. אישור עמידות לפיצוץ; מבנה קומפקטי
3. טווח זרועות 1600-3800 מ"מ; עומס סופי של 5-15 ק"ג
4. רמת הגנה של כדור היד מגיעה עד IP67
5. ניתן לשילוב עם מערכת ראייה תלת-ממד לרובוטי צביעה חכמים וידית הדרכה עם טכנולוגיית AR, מה שמאפשר שימוש קל ונוח
6. מתאים לסביבת פעילות ריסוס בחלל צר
 |
 |
| רובוטים חכמים לציפוי בשטח הציפוי | רובוטים חכמים לציפוי בשטח הציפוי |
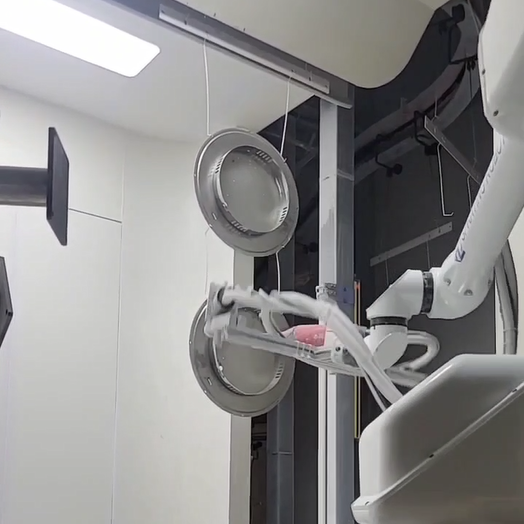
רובוט ריסוס חכם עם זכויות יוצרים עצמאיות, בעל זרוע ארוכה, ממלא את הפער בתחום הרובוטים הגדולים לרסוס בסין. כדור היד משתמש במבנה מיוחד מסוג BBR, ואין נקודת סינגולריות בריסוס קדמי, מה שמשפר במידה רבה את יעילות ואיכות הריסוס.
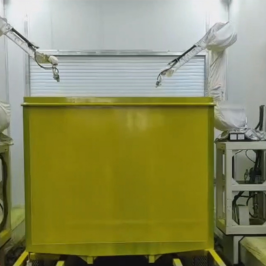
משולב עם מערכת ויזואלית ומערכת תכנון אוטומטית ליצירת מערכת סטנדרטית של רובוט צביעה חכמה, כדי להשיג מטרת הוראה חופשית, ריסוס גמיש ויישום מהיר.
מספק פתרונות ריסוס אינטיליגנטיים משולבים לדרישות של לקוחות בתעשיות מובילות, מחליף עבודה ידנית עם רובוטים, חוסך בעלויות כוח אדם, חוסך בpaint, משפר את איכות הריסוס, מפחית זיהום, ובמקביל משפר את עקביות איכות הפנים של המוצר, מגביר את התחרותיות של המוצר, ועוזר לארגונים לשדרג את תהליכי הריסוס שלהם. כגון תעשיית רוח, קרונות, ספינות, מכונות בניין ועוד תחומים.
 |
| רובוטים חכמים לציפוי בשטח הציפוי |
המצלמה הויזואלית קולטת בזמן אמת את המידע על הצורה והמיקום של הפריט שנמצא לריסוס, ומייצרת באופן אוטומטי מסלול ריסוס על בסיס ענן הנקודות שנאסף מהפריט, לשם פתרון ריסוס של משטחים שטוחים, עקומות פשוטות ואחרים.
החזקת ידנית של אקדח ההזרקה כדי להשלים את ציפוי חלק העבודה החדש, הרובוט מקליט את מסלול הציפוי הידני, ואז הרובוט משלים את ציפוי חלקי העבודה הבאים, ובכך פותר את הבעיה של גישה מהירה לתוכנית ההזרקה הראשונה עבור ציפוי של סוגי רבים של חלקי עבודה.
תכנון מראש של מסלול ריסוס בפוזיציה הסטנדרטית של חלק העבודה, והשגת המיקום האמיתי של חלק העבודה באמצעות מצלמת ראייה, התאמת מסלול הריסוס בזמן אמת ושליחתו לרובוט כדי להשלים את ההזרקה, ובכך פותר את הבעיה של קושי במיקום ריסוס המוצר.
כל הזכויות שמורות © 2025 יאנגז'ואו OURS מכניון בעמ. - מדיניות הפרטיות


